路燈桿底板焊接機
機器人燈桿底板焊接機,型號 : RBW2-120/260
三焊接工位
用途:本焊接系統用于路燈桿底板焊接生產。通過機器人與焊接電源的實時通訊,根據不同的焊接位置采用不同的工藝參數,取得優質的焊縫。總體布局如下圖:

特點:
(1)帶有漲管功能,消除底板內孔和桿子之間的間隙,順利實現自動焊接。
(2)具有底板加強筋自動放置和焊接功能。
(3)采用日本川崎重工機器人,操作性好,質量過硬。
(4)采用肯倍焊接電源,焊縫質量好,焊接效率高。
(5)變位機翻轉角度大,可實現任意角度焊接。
(6)節省大量人工成本。
(7)可適應全天候長時間工作。
(8)焊接成型美觀,可靠性高。
(9)整個機器單向流水線的形式設計,桿子堆放在機器的左邊,一根接一根向右邊移動,完成焊接,焊接完成的桿子堆放到右邊。桿子移動升起,無需行車,操作人員勞動強度低。
(10)設立3個焊接工位,焊接生產速度更加快。
一個工位上下料,裝配底板,完成外焊接賀4個加強三角筋的焊接。
第二個工位完成內圈的焊接
| No. | Item | Parameter |
| 1 |
小直徑 Pole or Round bar min diameter |
120mm |
| 2 |
路燈桿直徑 Pole or Round bar max diameter |
260mm |
| 3 |
長度 Pole or Round bar max.length |
12~14m |
| 4 |
小厚度 Pole or Round bar min. thickness |
2.5mm |
| 5 |
厚度 Pole or Round bar max. thickness |
4mm |
| 6 |
重量 Pole or Round bar max weight |
150kg |
| 7 |
驅動速度 Driving speed |
6~48m/h, adjustable, with AC Servo control 伺服可調 |
| 8 |
焊接速度 Welding speed( depend on Voltage , current setting, and welding height, and dimension of pole) |
參考速度5~7分鐘/根 (reference speed 5~7 minutes/piece) |

機器人系統介紹
1、川崎機器人
BA系列是專為焊接開發的機器人系列,專用于焊接,操作簡單,可以通過簡單的示教操作即可達到熟練的焊接作業操作。在示教器上設有可視效果及便于操作的可觸摸液晶彩色顯示屏。機器人與焊機僅需要一根電纜連接,可將焊接條件分類存儲,一鍵調用。

|
示教方式 Teaching methods |
簡單操作示教AS語言編程 Simple Operation Teaching AS Language Programming |
|
|
動作方式 Manner of execution |
手動模式 Manual mode |
各軸獨立、基本坐標系、工具坐標系 Independent axes, basic coordinate system and tool coordinate system |
| 再現模式Reproduction mode |
各軸/直線、圓弧插補動作 Interpolation action of each axis/line and arc |
|
|
存儲容量 Storage capacity |
8MB(8000步相當) 8000 steps are equivalent |
|
| 通用信號General signal |
外部操作信號 External Operating Signal |
緊急停止,外部保持信號 Emergency stop, external hold signal |
|
輸入輸出 Input and output |
32+32 | |
川崎BA系列機器人采用 E01控制柜,外形緊湊,操作體系適宜,功能豐富,易維護和具有高擴展性。6.5英寸彩色液晶屏幕,觸摸屏640×480像素。采用背照光,使液晶畫面更容易看清。操作系統采用WINDOWS CE。窗口顯示采用下拉式菜單,使編輯操作過程簡單易行。

|
功能 Fuctions |
標準弧焊Standard arc welding | |
|
型號 Model |
BA006N | |
|
手臂形式 Arm form |
垂直多關節Vertical multiple joints | |
| 動作自由度DOF | 6軸axis | |
|
負載能力 Maximum load capacity(KG) |
6 | |
|
動作范圍 Maximum range of action [DEG] |
JT1 電源線及控制線 |
±165 |
| JT2 | +150~-90 | |
| JT3 | +45~-175 | |
| JT4 | ±180 | |
| JT5 | ±135 | |
| JT6 | ±360 | |
|
動作速度 Maximum speed of action [DEG/S] |
JT1 電源線及控制線 |
240 |
| JT2 | 240 | |
| JT3 | 220 | |
| JT4 | 430 | |
| JT5 | 430 | |
| JT6 | 650 | |
|
慣量 Inertia[N.M] |
JT4 | 12 |
| JT5 | 12 | |
| JT6 | 3.75 | |
|
慣性力矩 Inertial moment [KG.M2] |
JT4 | 0.4 |
| JT5 | 0.4 | |
| JT6 | 0.07 | |
|
重復定位精度 Repeated positioning accuracy [MM] |
±0.05 | |
|
水平伸長度 Horizontal elongation[MM] |
1445 | |
|
本體重量 Weight[KG] |
150 | |
|
電源容量 Power capacity[KVA] |
3.0 | |
|
安裝方式 Installation mode |
地面、頂裝Ground、Top loading | |
|
安裝環境 Installation environment |
溫度 Temperature |
0~45° |
|
濕度 Humidity |
35~85%(不能結露No dew) | |
|
振動 Vibration |
0.5G以下Less than 0.5 | |
|
其他 Others |
機器人安裝必須遠離:易燃或腐蝕性液體或氣體 電器的干擾 Robot installation must be away from the interference of flammable or corrosive liquid or gas appliances |
|
|
IP等級 Level |
IP65 | |
|
推薦控制器 Recommended Controller |
E01 | |
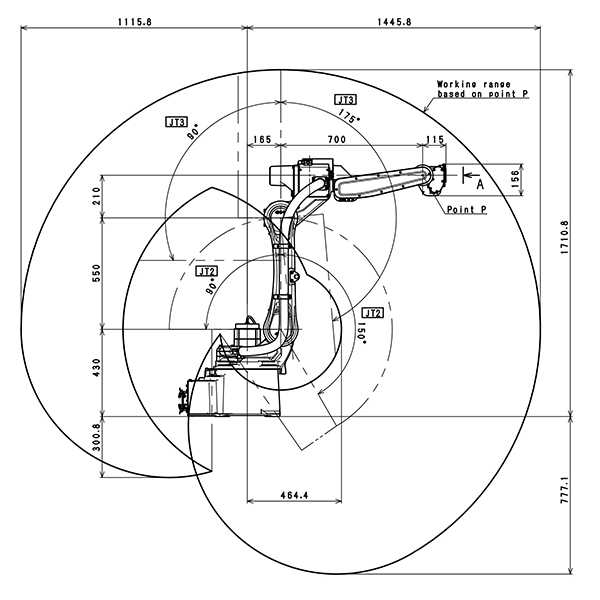
動作范圍:
2、焊機和防撞器介紹, iCATmini 防撞器。

焊接電源:芬蘭肯倍原裝
| Model 型號 | KW300A |
|
Cooling type 冷卻方式 |
Air cooling |
| Arcing time factor暫載率 | 100% |
| Rated value額定值 | 300A CO2 |
| 300A mixed gas混合氣體 | |
| Wire feeding diameter 送絲直徑 | 1.0-1.2mm |
| Model 型號 | Robot mount iCAT mini |
| Size 尺寸 |
L:92mm(exclude flange)Diameter: 88mm 16000 |
| Weight 重量 | 850g |
|
Loading weight 承受重量 |
24N±3N |
|
Re-positioning accuracy 重復定位精度 |
<±0.1mm |
|
Loading of contact 接觸器負載 |
24VDC Max. 100mA |
3、運行環境
1、接地:C種接地,接地電阻小于10歐姆。2、焊絲:盤裝焊絲
3、使用環境條件(室內)
環境溫度:-5℃~40℃。
相對濕度:≤80%。不結露。
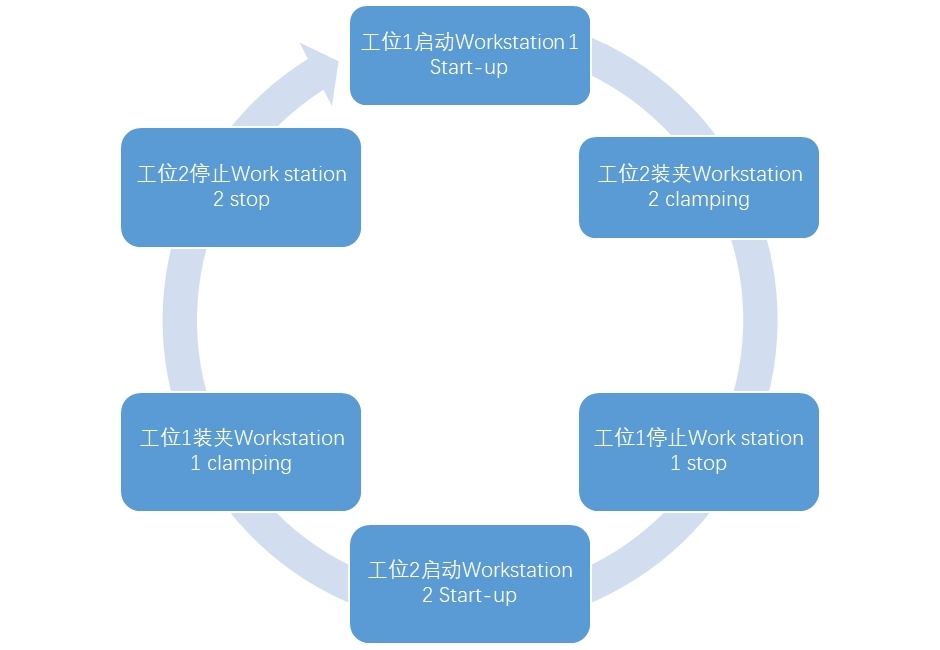
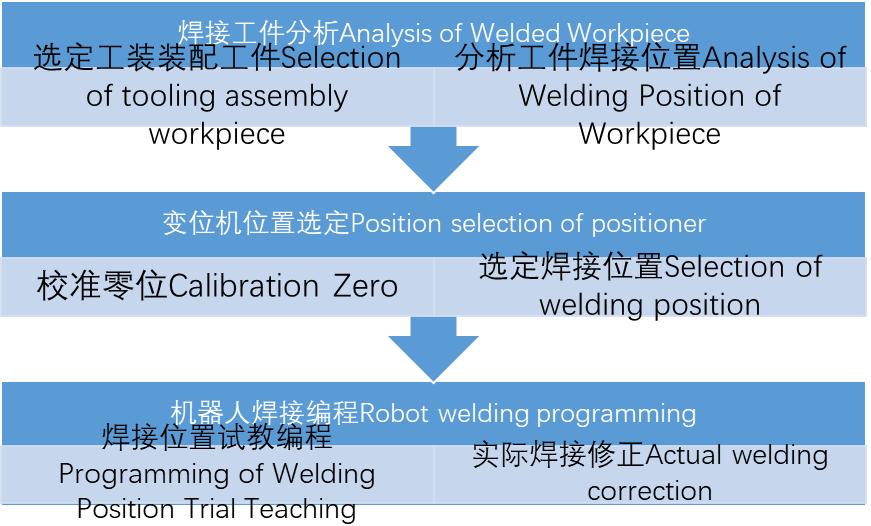
4、編程及工作流程
4.1編程流程
4.2工作流程